| |
RoboTuna
I (robot-thon), David Barrett, et
RoboTuna II, David Beal et Michael Sachinis, MIT, U.S.A.
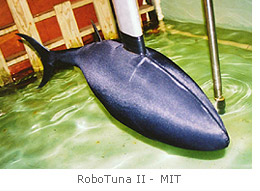 Le projet
Robotuna a démarré en 1993 avec l'objectif de développer un meilleur
système de propulsion pour les véhicules sous-marins autonomes. Le thon
a été choisi comme modèle pour sa rapidité (un thon rouge peut aller
jusqu'à 74 km/h) et ses accélérations. Il s'agit de comprendre comment
un poisson peut générer assez d'énergie pour atteindre de telles
vitesses. RoboTuna évolue dans l'aquarium du MIT, suspendu par un mât,
lui-même fixé à un système qui coulisse le long de la cuve (voir le mât
blanc sur la photo). Le mât sert également pour passer les câbles qui
relient le robot aux contrôleurs. Ainsi, les contrôleurs reçoivent les
informations des capteurs en entrée et renvoient des instructions au
robot-thon. Celui-ci comprend 8 vertèbres et un système de câbles qui
sert de tendons et de muscles. L'enveloppe est composée d'une couche
fine et flexible de mousse recouverte de Lycra pour se rapprocher de la
souplesse et de la finesse de la peau du thon, élément jugé primordial
dans l'efficacité de sa nage. Le projet
Robotuna a démarré en 1993 avec l'objectif de développer un meilleur
système de propulsion pour les véhicules sous-marins autonomes. Le thon
a été choisi comme modèle pour sa rapidité (un thon rouge peut aller
jusqu'à 74 km/h) et ses accélérations. Il s'agit de comprendre comment
un poisson peut générer assez d'énergie pour atteindre de telles
vitesses. RoboTuna évolue dans l'aquarium du MIT, suspendu par un mât,
lui-même fixé à un système qui coulisse le long de la cuve (voir le mât
blanc sur la photo). Le mât sert également pour passer les câbles qui
relient le robot aux contrôleurs. Ainsi, les contrôleurs reçoivent les
informations des capteurs en entrée et renvoient des instructions au
robot-thon. Celui-ci comprend 8 vertèbres et un système de câbles qui
sert de tendons et de muscles. L'enveloppe est composée d'une couche
fine et flexible de mousse recouverte de Lycra pour se rapprocher de la
souplesse et de la finesse de la peau du thon, élément jugé primordial
dans l'efficacité de sa nage.
RoboTuna et RoboTuna II : http://web.mit.edu/towtank/www-new/Tuna/tuna.html
|
|
| |
|
 |
|
 |
| |
RoboPike (robot-brochet), John
Kumph, MIT, U.S.A.
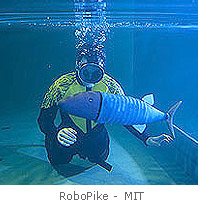 Après
RoboTuna, un autre robot-poisson est réalisé au MIT : RoboPike, le
robot brochet (le brochet intéresse les chercheurs pour ses
accélérations fulgurantes). RoboPike n'est pas maintenu dans l'aquarium
par un système de poulie comme son prédécesseur et peut nager
librement. Mais il n'est pas autonome : sa navigation est dirigée par
un humain et c'est l'ordinateur qui interprète les commandes et renvoie
les signaux appropriés à chaque moteur. À l'époque, John Kump étudie
les mouvements des poissons de façon approfondie pour pouvoir les
reproduire. Il travaille aussi sur la forme et la souplesse à donner à
son robot. Ainsi, il le dote d'un exosquelette en forme de ressort à
spirale. Après
RoboTuna, un autre robot-poisson est réalisé au MIT : RoboPike, le
robot brochet (le brochet intéresse les chercheurs pour ses
accélérations fulgurantes). RoboPike n'est pas maintenu dans l'aquarium
par un système de poulie comme son prédécesseur et peut nager
librement. Mais il n'est pas autonome : sa navigation est dirigée par
un humain et c'est l'ordinateur qui interprète les commandes et renvoie
les signaux appropriés à chaque moteur. À l'époque, John Kump étudie
les mouvements des poissons de façon approfondie pour pouvoir les
reproduire. Il travaille aussi sur la forme et la souplesse à donner à
son robot. Ainsi, il le dote d'un exosquelette en forme de ressort à
spirale.
RoboPike (81 cm de long) sait assez bien nager mais il n'est pas encore
équipé de capteurs pour l'empêcher de se heurter aux obstacles (comme
ce sera ensuite le cas du Essex Robotic Fish).
RoboPike : http://web.mit.edu/towtank/www-new/Pike/pike.html
|
|
| |
|
|
|
|
| |
PPF-04, Koichi Hirata, NMRI, Japon
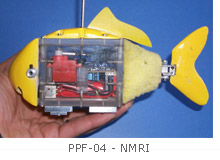  Le NMRI (National Maritime Research Institute) a
développé de nombreux projets de robots-poissons (série PF et série
PPF) dans l'optique d'appliquer, dans le futur, les capacités des
poissons à nos bateaux et sous-marins. Le PPF-04 est un (tout) petit
robot-poisson de 19 cm et 400 g, radio commandé. Sa taille permet de le
tester dans une petite cuve (comme une baignoire). L'étude a porté,
entre autres, sur la relation entre la vitesse et l'amplitude des
oscillations de la nageoire caudale. Le NMRI (National Maritime Research Institute) a
développé de nombreux projets de robots-poissons (série PF et série
PPF) dans l'optique d'appliquer, dans le futur, les capacités des
poissons à nos bateaux et sous-marins. Le PPF-04 est un (tout) petit
robot-poisson de 19 cm et 400 g, radio commandé. Sa taille permet de le
tester dans une petite cuve (comme une baignoire). L'étude a porté,
entre autres, sur la relation entre la vitesse et l'amplitude des
oscillations de la nageoire caudale.
L'accueil des robots-poissons du NMRI : http://www.nmri.go.jp/eng/khirata/fish/
Ne pas hésiter à visiter le plus de pages possibles : elles contiennent
des photos, des schémas, des vidéos.
La page du PPF-04.
|
|
| |
|
|
|
|
| |
Cœlacanth, Yuuzi Terada, Mitsubishi,
Japon
 Pour sa
part, Mitsubishi Heavy Industries a réalisé un cœlacanthe (grand
poisson très primitif que l'on croyait disparu) robotisé de 70 cm de
long et pesant 12 kg. Ce modèle est le premier d'une série appelée
"Mitsubishi Animatronics". L'animatronique (des mots animation et
électronique) désigne les techniques qui permettent, au cinéma, de
donner vie à des créatures artificielles. Destiné à être commercialisé
dans les aquariums et les parcs, le cœlacanthe a fait son entrée au
musée des sciences Aquatom de Fuki au Japon en juin 2001. Le Cœlacanth
se situe entre l'automate et le robot. Il est entièrement contrôlé par
ordinateur, via une communication sans fil, et quand un visiteur veut
le voir nager, il doit appuyer sur un bouton. Ce projet, qui soigne
particulièrement l'aspect de ses "poissons", donne l'occasion de voir
un fossile vivant. Pour sa
part, Mitsubishi Heavy Industries a réalisé un cœlacanthe (grand
poisson très primitif que l'on croyait disparu) robotisé de 70 cm de
long et pesant 12 kg. Ce modèle est le premier d'une série appelée
"Mitsubishi Animatronics". L'animatronique (des mots animation et
électronique) désigne les techniques qui permettent, au cinéma, de
donner vie à des créatures artificielles. Destiné à être commercialisé
dans les aquariums et les parcs, le cœlacanthe a fait son entrée au
musée des sciences Aquatom de Fuki au Japon en juin 2001. Le Cœlacanth
se situe entre l'automate et le robot. Il est entièrement contrôlé par
ordinateur, via une communication sans fil, et quand un visiteur veut
le voir nager, il doit appuyer sur un bouton. Ce projet, qui soigne
particulièrement l'aspect de ses "poissons", donne l'occasion de voir
un fossile vivant.
C'est en fait une filiale de Mitsubishi Heavy Industries, la société
Ryomei Engineering, qui a réalisé le Cœlacanth ainsi qu'une dorade (sea
bream), une carpe dorée, une carpe koï.
La page de Mitsubishi : http://www.mhi.co.jp/enews/e_0898.html
|
|
| |
|
|
|
|
| |
Robot-poisson SPC-03, BUAA - CASIA,
Chine
 Le SPC-03
mesure 1,23 mètre de long et ressemble à un poisson autant par sa forme
que par ses mouvements. Il est stable, très maniable, et est contrôlé à
distance par des techniciens. Il peut travailler 2 à 3 heures en
immersion, à la vitesse maximum de 4 km/h. Ce robot-poisson est destiné
à l'exploration archéologique sous-marine mais les deux responsables du
projet, Wang Tianmiao (BUAA) et Tan Min (CAS), envisagent bien d'autres
utilisations telles que la photographie sous-marine, la cartographie
des fonds sous-marins, le transport de petits objets… Le SPC-03
mesure 1,23 mètre de long et ressemble à un poisson autant par sa forme
que par ses mouvements. Il est stable, très maniable, et est contrôlé à
distance par des techniciens. Il peut travailler 2 à 3 heures en
immersion, à la vitesse maximum de 4 km/h. Ce robot-poisson est destiné
à l'exploration archéologique sous-marine mais les deux responsables du
projet, Wang Tianmiao (BUAA) et Tan Min (CAS), envisagent bien d'autres
utilisations telles que la photographie sous-marine, la cartographie
des fonds sous-marins, le transport de petits objets…
Fruit de plusieurs années de recherche, le robot a été testé en août
2004 sur le site d'un bâtiment de guerre nauvragé. Les archéologues
chinois s'intéressent à ce navire de guerre car il a coulé dans les
eaux de l'île de Dongshan (province de Fujian, Chine) il y a environ
340 ans. Ce navire appartenait au général Zheng Chenggong qui a repris
l'île de Taiwan aux Hollandais en 1662 (Dongshan et Taiwan se trouvent
à seulement 277 km l'une de l'autre, de chaque côté du détroit de
Taiwan). Des pièces d'armement et des objets de valeur (porcelaine)
ayant déjà été trouvés sur ce site, les autorités chinoises ont décidé
de continuer les recherches afin de localiser d'autres vestiges. Ainsi,
le robot-poisson a exploré une surface de plus de 4000 m2 sur 6 heures
d'immersion. Il a pris de nombreuses photos et les a transmis à la
surface.
|
|
| |
|
|
|
|
| |
Robot Anguille, Projet Robea, équipe
pluridisciplinaire, CNRS, France
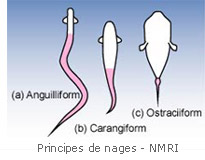
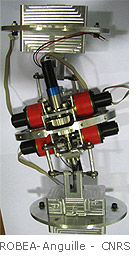  L'objectif du projet ROBEA-Anguille est de
"concevoir, étudier et réaliser un robot anguille capable de nager en
trois dimensions". Alors que certains poissons comme le thon ont un
mode de locomotion basée sur des oscillations du corps, la locomotion
anguilliforme (anguille, lamproie…) est basée sur des ondulations du
corps. Ainsi, la nage de l'anguille présente des performances
remarquables en terme de manœuvrabilité. C'est le nombre élevé de
degrés de liberté internes de ce poisson qui lui permet de se faufiler
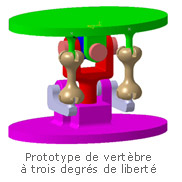
dans les endroits les plus difficiles d'accès. Le prototype du projet
ROBEA consiste en un empilement de plates-formes de type rotule,
imitant les vertèbres de l'anguille. Ce projet national rassemble
plusieurs laboratoires dont le LAG, Laboratoire d'automatique de
Grenoble, qui est par exemple chargé de mettre en place les systèmes de
contrôle des mouvements de l’anguille (orientation, vitesse) ainsi que
la stabilisation en roulis du robot. L'objectif du projet ROBEA-Anguille est de
"concevoir, étudier et réaliser un robot anguille capable de nager en
trois dimensions". Alors que certains poissons comme le thon ont un
mode de locomotion basée sur des oscillations du corps, la locomotion
anguilliforme (anguille, lamproie…) est basée sur des ondulations du
corps. Ainsi, la nage de l'anguille présente des performances
remarquables en terme de manœuvrabilité. C'est le nombre élevé de
degrés de liberté internes de ce poisson qui lui permet de se faufiler
dans les endroits les plus difficiles d'accès. Le prototype du projet
ROBEA consiste en un empilement de plates-formes de type rotule,
imitant les vertèbres de l'anguille. Ce projet national rassemble
plusieurs laboratoires dont le LAG, Laboratoire d'automatique de
Grenoble, qui est par exemple chargé de mettre en place les systèmes de
contrôle des mouvements de l’anguille (orientation, vitesse) ainsi que
la stabilisation en roulis du robot.
La locomotion à l'IRCCYN: http://www.irccyn.ec-nantes.fr/spip.php?rubrique200&sstheme=203
|
|
| |
|
|
|
|
| |
Boxybot (de boxfish, poisson
coffre), Daisy Lachat, BIRG – EPFL, Suisse
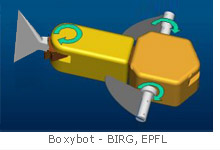 Développé au
BIRG (Biologically Inspired Robotics Group), le projet Boxybot a pour
objectif la réalisation d'un robot autonome capable d'évoluer dans
l'eau. Les recherches ont en particulier porté sur l'étude et la
réalisation des différentes formes et utilisations des nageoires chez
les poissons de type labriforme et ostraciiforme : ces poissons ont un
corps rigide et une faible vitesse mais une grande manœuvrabilité grâce
à leurs nageoires. Chez les poissons de type labriforme, les nageoires
pectorales servent à la propulsion et la nageoire caudale est utilisée
comme gouvernail. Le Boxybot mesure 25 cm de long et peut nager jusqu'à
0,37 m/s. Il peut plonger, nager en avant, en arrière, sur le
côté et effectuer des vrilles. La vitesse dépend de l'amplitude et de
la fréquence des oscillations des nageoires (avec des seuils à ne pas
dépasser), et aussi de la taille et de la rigidité de celles-ci. Développé au
BIRG (Biologically Inspired Robotics Group), le projet Boxybot a pour
objectif la réalisation d'un robot autonome capable d'évoluer dans
l'eau. Les recherches ont en particulier porté sur l'étude et la
réalisation des différentes formes et utilisations des nageoires chez
les poissons de type labriforme et ostraciiforme : ces poissons ont un
corps rigide et une faible vitesse mais une grande manœuvrabilité grâce
à leurs nageoires. Chez les poissons de type labriforme, les nageoires
pectorales servent à la propulsion et la nageoire caudale est utilisée
comme gouvernail. Le Boxybot mesure 25 cm de long et peut nager jusqu'à
0,37 m/s. Il peut plonger, nager en avant, en arrière, sur le
côté et effectuer des vrilles. La vitesse dépend de l'amplitude et de
la fréquence des oscillations des nageoires (avec des seuils à ne pas
dépasser), et aussi de la taille et de la rigidité de celles-ci.
Voir le projet et les vidéos.
|
|
| |
|
|
|
|
| |
Essex Robotic Fish, Jindong Liu,
Huosheng Hu,
Dept of Computer Science University of Essex, G.B.
 Le but des chercheurs de l'université d'Essex
était de réaliser un robot-poisson qui sache nager comme un poisson
réel et qui soit autonome. Un poisson dispose de différents modes de
déplacement (vitesse, virages, accélérations, freinage) et le challenge
des chercheurs d'Essex était d'obtenir un robot-poisson autonome qui
puissent reproduire tous ces comportements et non un ou deux de façon
plus ou moins uniforme. Ils ont donc répertorié les différents
comportements dans une bibliothèque utilisée par l'ordinateur pour
générer des trajectoires de nage variées et inattendues. Le Robotic
Fish (50 cm de long) est par exemple capable de courber son corps selon
un grand angle dans un temps très réduit (environ 90°/0.20sec).
Plusieurs modèles ont été réalisés, depuis le G1 en 2003 jusqu'aux G8
et G9 en 2005. Les chercheurs continuent à travailler sur
l'amélioration des algorithmes d'apprentissage qui permettent au robot
de générer des comportements adaptatifs dans un environnement changeant
et donc imprévisible. Le but des chercheurs de l'université d'Essex
était de réaliser un robot-poisson qui sache nager comme un poisson
réel et qui soit autonome. Un poisson dispose de différents modes de
déplacement (vitesse, virages, accélérations, freinage) et le challenge
des chercheurs d'Essex était d'obtenir un robot-poisson autonome qui
puissent reproduire tous ces comportements et non un ou deux de façon
plus ou moins uniforme. Ils ont donc répertorié les différents
comportements dans une bibliothèque utilisée par l'ordinateur pour
générer des trajectoires de nage variées et inattendues. Le Robotic
Fish (50 cm de long) est par exemple capable de courber son corps selon
un grand angle dans un temps très réduit (environ 90°/0.20sec).
Plusieurs modèles ont été réalisés, depuis le G1 en 2003 jusqu'aux G8
et G9 en 2005. Les chercheurs continuent à travailler sur
l'amélioration des algorithmes d'apprentissage qui permettent au robot
de générer des comportements adaptatifs dans un environnement changeant
et donc imprévisible.
Pour en savoir plus: http://dces.essex.ac.uk/staff/hhu/
Vidéos
: http://dces.essex.ac.uk/staff/hhu/jliua/videogal.htm
Vidéo
tournée à l'Aquarium.
|
|
| |
|
|
|
|
| |
Robotic koi (carpe koï), Ryomei
Engineering, Japon
 Un robot-poisson inspiré de la carpe koï a été
présenté en mars 2006 au Japon. Il a été développé par trois sociétés
dont la Ryomei Engineering, une filiale de Mitsubishi Heavy Industries,
qui est déjà à l'origine de la série "Mitsubishi Animatronics" (voir le
Cœlacanth). La carpe koï a été choisie car elle est symbole de force et
de chance au Japon. Le robot, qui mesure 80 cm et pèse 12 kg, est
télécommandé. Sa bouche est équipée de capteurs servant à contrôler la
concentration d'oxygène dans l'eau, information essentielle si l'on
veut surveiller la santé des poissons. Un robot-poisson inspiré de la carpe koï a été
présenté en mars 2006 au Japon. Il a été développé par trois sociétés
dont la Ryomei Engineering, une filiale de Mitsubishi Heavy Industries,
qui est déjà à l'origine de la série "Mitsubishi Animatronics" (voir le
Cœlacanth). La carpe koï a été choisie car elle est symbole de force et
de chance au Japon. Le robot, qui mesure 80 cm et pèse 12 kg, est
télécommandé. Sa bouche est équipée de capteurs servant à contrôler la
concentration d'oxygène dans l'eau, information essentielle si l'on
veut surveiller la santé des poissons.
Dans une seconde étape, les chercheurs veulent rendre leur robot
autonome. Grâce à sa caméra, le robot pourrait être envoyé en
reconnaissance pour examiner les ressources présentes dans les
profondeurs. Il pourrait aussi servir à inspecter les plates-formes
pétrolières pour repérer et surveiller d'éventuels dommages.
Vidéo du
robot : http://youtube.com/watch?v=M7YGEVuJ4mM
autre vidéo : http://youtube.com/watch?v=3P0aafialbg.
|
|
| |
|
|
|
|
| |
Remote Controlled Robotic Shark
 Dans la catégorie "Jouets et Jeux", un magasin
de New York vend (en ligne également) un requin télécommandé pour une
centaine de dollars. On nous dit que ce robot nage de façon élégante et
gracieuse à l'instar de son modèle. Il peut plonger à 2,7 m de
profondeur, et la télécommande, qui fonctionne jusqu'à 12 m de
distance, est également étanche, ce qui permet de nager avec lui. Ce
robot-jouet mesure environ 61 cm et deux modèles sont disponibles (bleu
ou rouge) et fonctionnent sur des longueurs d'ondes différentes pour
pouvoir les utiliser en même temps. Dans la catégorie "Jouets et Jeux", un magasin
de New York vend (en ligne également) un requin télécommandé pour une
centaine de dollars. On nous dit que ce robot nage de façon élégante et
gracieuse à l'instar de son modèle. Il peut plonger à 2,7 m de
profondeur, et la télécommande, qui fonctionne jusqu'à 12 m de
distance, est également étanche, ce qui permet de nager avec lui. Ce
robot-jouet mesure environ 61 cm et deux modèles sont disponibles (bleu
ou rouge) et fonctionnent sur des longueurs d'ondes différentes pour
pouvoir les utiliser en même temps.
Le site de HAMMACHER SCHLEMMER : http://www.hammacher.com/publish/72824.asp#
|
|
| |
|
|
|
|
| |
Raie Manta, EvoLogics, Allemagne
 Evologics est un essaimage de l'Université
Technique de Berlin en partenariat avec Festo. Grace à l'utilisation
d'actionneurs "Festo Fluidic Muscles" la forme des nageoires s'adapte
progressivement aux mouvements de l'eau autour du corps. La raie
utilise 3 modes de propulsion. Le premier utilise le mouvement des
nageoires pour assurer un déplacement silencieux, rapide et efficace
avec une grande manœuvrabilité. Le deuxième utilise la variation de
flottabilité grâce à l'ajustement du volume ce qui permet de planer
vers le haut ou vers le bas. Le troisième utilise un hydrojet pour un
complément de vitesse éventuel ou le suivi d'une trajectoire stable
nécessaire aux capteurs.
Cette technologie sera utile pour l'exploration en mer profonde,
l'industrie offshore, la recherche écologique sensible, la surveillance
environnementale et la sécurité maritime. Evologics est un essaimage de l'Université
Technique de Berlin en partenariat avec Festo. Grace à l'utilisation
d'actionneurs "Festo Fluidic Muscles" la forme des nageoires s'adapte
progressivement aux mouvements de l'eau autour du corps. La raie
utilise 3 modes de propulsion. Le premier utilise le mouvement des
nageoires pour assurer un déplacement silencieux, rapide et efficace
avec une grande manœuvrabilité. Le deuxième utilise la variation de
flottabilité grâce à l'ajustement du volume ce qui permet de planer
vers le haut ou vers le bas. Le troisième utilise un hydrojet pour un
complément de vitesse éventuel ou le suivi d'une trajectoire stable
nécessaire aux capteurs.
Cette technologie sera utile pour l'exploration en mer profonde,
l'industrie offshore, la recherche écologique sensible, la surveillance
environnementale et la sécurité maritime.
Vidéo
de la Raie Manta : http://www.youtube.com/watch?v=4kDZViMmHL0
|
|
| |
|
|
|
|
| |
Robofish, Université de Washington,
U.S.A.
 Le "Robofish" de l'Université de Washington
mesure 50cm de long et pèse 3kg. Il est très manoeuvrable et peut même
nager en marche arrière en inversant ses nageoires pectorales. Le "Robofish" de l'Université de Washington
mesure 50cm de long et pèse 3kg. Il est très manoeuvrable et peut même
nager en marche arrière en inversant ses nageoires pectorales.
Comme les ondes radio passent très mal dans l'eau, l'équipe de Kristi
Morgansen a étudié un système permettant à plusieurs Robots de
communiquer entre eux. Ainsi les robots peuvent se déplacer soit en
formation en nageant dans la même direction, soit se disperser pour
explorer une surface plus importante.
Durant l'expérience, 3 Robofish se sont échangé des données sur leur
vitesse et position de façon à ajuster en permanence leur trajectoire.
D'après Kristi Morgansen, le groupe a pu rester coordonné malgré la
perte de la moitié des informations dans la communication, ce qui
confirme la robustesse du dispositif.
Grâce à ce principe, on pourra bientôt utiliser des bancs de robots
poissons pour explorer de grandes surface, traquer la pollution marine
ou encore surveiller les déplacements des animaux marins.
La page officielle avec les vidéos
: http://www.engr.washington.edu/facresearch/highlights/aa_robofish.html
Vidéo du
"banc" de 3 Robofish : http://www.youtube.com/watch?v=Kk40ZnuzNNw
|
|
| |
|
|
|
|
| |
Raie Pastenague, Poisson Couteau et
autres,
Univ. Technolog. de Nanyang, Singapour
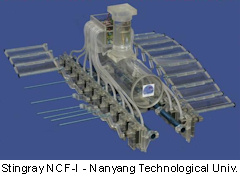 Les
chercheurs de l'Ecole d'Ingénierie Mécanique et Spatiale de Université
Technologique de Nanyang (Singapour) étudient la locomotion des
poissons. Leur objectif est de concevoir et optimiser des robots
poissons utilisant des mécanismes à nageoires ondulantes. Ainsi, ils
ont mis au point pour leurs expériences différents types de robots
poissons comme un Robot Raie Pastenague, un Robot Poisson-Couteau, un
Robot Arowana (poisson menacé) et d'autres...
Dans cette présentation
que nous a envoyée Yu Zhong, vous pourrez
trouver des infos supplémentaires sur la conception des nageoires
ondulantes et leur efficacité. Les
chercheurs de l'Ecole d'Ingénierie Mécanique et Spatiale de Université
Technologique de Nanyang (Singapour) étudient la locomotion des
poissons. Leur objectif est de concevoir et optimiser des robots
poissons utilisant des mécanismes à nageoires ondulantes. Ainsi, ils
ont mis au point pour leurs expériences différents types de robots
poissons comme un Robot Raie Pastenague, un Robot Poisson-Couteau, un
Robot Arowana (poisson menacé) et d'autres...
Dans cette présentation
que nous a envoyée Yu Zhong, vous pourrez
trouver des infos supplémentaires sur la conception des nageoires
ondulantes et leur efficacité.
Vidéo
du Robot poisson NAF-I: http://www.youtube.com/watch?v=FKVNprWTceo
Vidéo
du Robot Raie Pastenague NCF-I: http://www.youtube.com/watch?v=8sIFHOw4WC0
Vidéo
du Robot Poisson-Couteau NKF-II: http://www.youtube.com/watch?v=qU_bnb5q0RA
|
|
| |
|
|
|
|
| |
Tai-robot-kun, Université de
Kitakyushu, Japon
 Les
Ingénieurs de l'Université de Kitakyushu ont mis au point l'un des
robots biomimétiques les plus réalistes du monde. Les
Ingénieurs de l'Université de Kitakyushu ont mis au point l'un des
robots biomimétiques les plus réalistes du monde.
Ce vivaneau rouge est en fait un robot poisson connu sous le nom de
“Tai-robot-kun”.
Tai-robot-kun pèse 7kg et imite un véritable poisson en nageant en
silence pendant au moins une heure avec des accus pleinement chargés.
Il a un corps en silicone recouvert d'écailles peintes à la main pour
plus de réalisme, et, en faisant battre sa queue, il peut se propulser
vers l'avant et se laisser dériver comme un vrai poisson (source:
OTAKU).
Vidéo de Tai-robot-kun : http://www.youtube.com/watch?v=WINc1mV-L8Y
|
|
| |
|
|
|
|
| |
MIRO, AIRO inc, Corée du Sud
 MIRO(Marine Intelligence Robot) est un robot bio-mimétique conçu pour les musées et les applications ornementales et ludiques. Il utilise des articulations spéciales étanches jusqu'à 10m de profondeur. Il intègre une led rouge dans le nez et 2 leds blanches pour les yeux. MIRO nage habituellement en mode autonome mais il peux aussi être utilisé en mode télécommandé grâce à un panneau de contrôle tactile ou une application mobile (Android seulement). C'est utile pour l'interaction avec le public, notamment pour le contrôle dans les jeux.
L'ancêtre de MIRO qui s'appelait FIRO a été pour la 1ère fois exposé au Marine Robot Pavilion à L'Exposition Internatinale de Yeosu 2012. MIRO existe maintenant en 2 tailles, 53cm(MIRO-9) et 35cm(MIRO-7). MIRO(Marine Intelligence Robot) est un robot bio-mimétique conçu pour les musées et les applications ornementales et ludiques. Il utilise des articulations spéciales étanches jusqu'à 10m de profondeur. Il intègre une led rouge dans le nez et 2 leds blanches pour les yeux. MIRO nage habituellement en mode autonome mais il peux aussi être utilisé en mode télécommandé grâce à un panneau de contrôle tactile ou une application mobile (Android seulement). C'est utile pour l'interaction avec le public, notamment pour le contrôle dans les jeux.
L'ancêtre de MIRO qui s'appelait FIRO a été pour la 1ère fois exposé au Marine Robot Pavilion à L'Exposition Internatinale de Yeosu 2012. MIRO existe maintenant en 2 tailles, 53cm(MIRO-9) et 35cm(MIRO-7).
Plus d'information sur le site du fabricant de MIRO: AIRO(Artificial Intelligence Robot) : http://www.airo.kr/
Chaine Youtube d'AIRO : https://www.youtube.com/channel/UCZC8HbPvtUdXcicyVDgaOUw/
Page Facebook d'AIRO: https://www.facebook.com/robotfish.miro
|
|
| |
|
|
|
|
| |
Jessiko, ROBOTSWIM, France
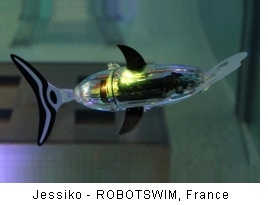 Jessiko est un des plus petits robots poissons du monde (22cm/150g). Grâce à son potentiel communicatif et à son intelligence artificielle, Jessiko peut nager en bancs de façon à former des chorégraphies aquatiques et lumineuses très attrayantes. Christophe Tiraby, l'inventeur du robot et créateur de la société Robotswim, a gagné avec ce projet le Grand Prix de l'Innovation de la Ville de Paris en catégorie "Design industriel". Jessiko est un des plus petits robots poissons du monde (22cm/150g). Grâce à son potentiel communicatif et à son intelligence artificielle, Jessiko peut nager en bancs de façon à former des chorégraphies aquatiques et lumineuses très attrayantes. Christophe Tiraby, l'inventeur du robot et créateur de la société Robotswim, a gagné avec ce projet le Grand Prix de l'Innovation de la Ville de Paris en catégorie "Design industriel".
La version de série a été déployée pour la première fois sur le pavillon de la France lors de l'Exposition Internationale Yeosu 2012 en Corée du Sud.
Jessiko est actuellement proposé pour les opérations événementielles et la décoration de prestige (hôtels de luxe, centre commerciaux, musées, salles d'attentes, discothèques...).
Plus d'informations sur le site web de Robotswim : http://www.robotswim.com/
Les videos les plus hallucinantes de Jessiko : https://www.youtube.com/watch?v=J_qFOQkrxHA
La page Facebook de Jessiko: https://www.facebook.com/jessiko.robot.fish
|
|
| |
|
|
|
|
