| |
RoboTuna
I (robot-tuna), David Barrett, and
RoboTuna II, David Beal and Michael Sachinis, MIT, the U.S.A.
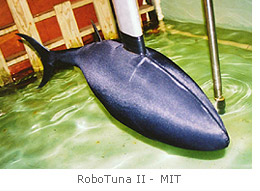 The
Robotuna project started in 1993 with the objective to develop a better
system of propulsion for the autonomous underwater vehicles. The tuna
was selected as model for its speed (a blue fin tuna can go up to 74
km/h) and its accelerations. It is a question of
including/understanding how a fish can generate energy enough to reach
such speeds. RoboTuna evolves/moves in the aquarium of MIT, suspended
by a mast, itself fixed at a system which slides along the tank (see
the white mast on the photograph). The mast is also used for to pass
the cables which connect the robot to the controllers. Thus, the
controllers receive information from the sensors in entry and return
instructions to robot-tuna. This one includes/understands 8 vertebrae
and a system of cables which is used of tendons and muscles. The
envelope is made up of a fine and flexible layer of foam covered with
Lycra to approach the flexibility and smoothness the tuna skin. The
Robotuna project started in 1993 with the objective to develop a better
system of propulsion for the autonomous underwater vehicles. The tuna
was selected as model for its speed (a blue fin tuna can go up to 74
km/h) and its accelerations. It is a question of
including/understanding how a fish can generate energy enough to reach
such speeds. RoboTuna evolves/moves in the aquarium of MIT, suspended
by a mast, itself fixed at a system which slides along the tank (see
the white mast on the photograph). The mast is also used for to pass
the cables which connect the robot to the controllers. Thus, the
controllers receive information from the sensors in entry and return
instructions to robot-tuna. This one includes/understands 8 vertebrae
and a system of cables which is used of tendons and muscles. The
envelope is made up of a fine and flexible layer of foam covered with
Lycra to approach the flexibility and smoothness the tuna skin.
RoboTuna and RoboTuna II : http://web.mit.edu/towtank/www-new/Tuna/tuna.html
|
|
| |
|
 |
|
 |
| |
RoboPike, John Kumph, MIT, the U.S.A.
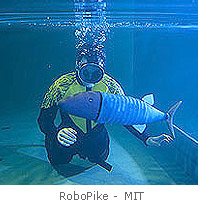 After
RoboTuna, another robotic fish is designed at MIT: RoboPike, the robot
pike (the pike interests the researchers for its fulgurating
accelerations). RoboPike is not maintained in the aquarium by a system
of pulley like its predecessor and can swim freely. But it is not
autonomous: its navigation is directed by human and it is the computer
which interprets the orders and returns the signals appropriate to each
engine. At the time, John Kump studies the movements of fish thoroughly
to be able to reproduce them. He also works on the form and the
flexibility to be given to his robot. Thus, it equips it with a
exosquelette in the shape of spring with spiral. After
RoboTuna, another robotic fish is designed at MIT: RoboPike, the robot
pike (the pike interests the researchers for its fulgurating
accelerations). RoboPike is not maintained in the aquarium by a system
of pulley like its predecessor and can swim freely. But it is not
autonomous: its navigation is directed by human and it is the computer
which interprets the orders and returns the signals appropriate to each
engine. At the time, John Kump studies the movements of fish thoroughly
to be able to reproduce them. He also works on the form and the
flexibility to be given to his robot. Thus, it equips it with a
exosquelette in the shape of spring with spiral.
RoboPike (81 cm length) can swim rather well but it is not equipped yet
with sensors to prevent it from running up against the obstacles (as it
will be then the case of Essex Robotic Fish).
RoboPike : http://web.mit.edu/towtank/www-new/Pike/pike.html
|
|
| |
|
|
|
|
| |
PPF-04, Koichi Hirata, NMRI, Japan
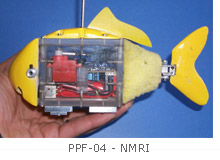  The NMRI (National Maritime Research Institute)
developed many projects of robotic fish (series PF and series PPF) with
a view to apply, in the future, the capacities of fish to our boats and
submarines. The PPF-04 is one (all) small robotic fish of 19 cm and 400
g, remote controlled. Its size makes it possible to test it in a small
tank (like a bath-tub). The study carried, inter alia, on the relation
between the speed and the amplitude of the oscillations of the caudal
fin. The NMRI (National Maritime Research Institute)
developed many projects of robotic fish (series PF and series PPF) with
a view to apply, in the future, the capacities of fish to our boats and
submarines. The PPF-04 is one (all) small robotic fish of 19 cm and 400
g, remote controlled. Its size makes it possible to test it in a small
tank (like a bath-tub). The study carried, inter alia, on the relation
between the speed and the amplitude of the oscillations of the caudal
fin.
Robotic fish homepage of NMRI : http://www.nmri.go.jp/eng/khirata/fish/
Do not hesitate to visit the most possible pages: they contain
photographs, diagrams, videos.
Page of PPF-04.
|
|
| |
|
|
|
|
| |
Cœlacanth, Yuuzi Terada, Mitsubishi,
Japan
 On its part, Mitsubishi Heavy Industries carried out coelacanth (large
very primitive fish that one believed disappeared) robotized of 70 cm
length and weighing 12 kg. This model is the first of a series called
"Mitsubishi Animatronics". Animatronics (of the words animation and
electronics) indicates the techniques which make it possible, with the
cinema, to give life to artificial creatures. Intended to be
distributed in the aquariums and the parks, the coelacanth was first
presented at the museum of sciences Aquatom of Fuki in Japan in June
2001. Coelacanth is located between the automat and the robot. It is
entirely controlled by computer, via a communication without wire, and
when a visitor wants to see it swimming, it must press on a button.
This project, which particularly looks after the aspect of its "fish",
gives the opportunity to see an alive fossil.
On its part, Mitsubishi Heavy Industries carried out coelacanth (large
very primitive fish that one believed disappeared) robotized of 70 cm
length and weighing 12 kg. This model is the first of a series called
"Mitsubishi Animatronics". Animatronics (of the words animation and
electronics) indicates the techniques which make it possible, with the
cinema, to give life to artificial creatures. Intended to be
distributed in the aquariums and the parks, the coelacanth was first
presented at the museum of sciences Aquatom of Fuki in Japan in June
2001. Coelacanth is located between the automat and the robot. It is
entirely controlled by computer, via a communication without wire, and
when a visitor wants to see it swimming, it must press on a button.
This project, which particularly looks after the aspect of its "fish",
gives the opportunity to see an alive fossil.
In fact, it is a subsidiary company of Mitsubishi Heavy Industries, the
company Ryomei Engineering, which carried out Coelacanth as well as a
sea-bream, a gilded carp, a carp koï.
Mitsubishi homepage : http://www.mhi.co.jp/enews/e_0898.html
|
|
| |
|
|
|
|
| |
Robotic fish SPC-03, BUAA - CASIA,
China
 The SPC-03
measures 1,23 meter length and resembles as much a fish by its form
that by its movements. It is stable, very handy, and is controlled
remotely by technicians. It can work 2 to 3 hours in immersion, at the
maximum speed of 4 km/h. This robotic fish is intended for underwater
archaeological exploration but the two persons in charge for the
project, Wang Tianmiao (BUAA) and Tan Min (CASE), consider many other
uses such as underwater photography, the cartography of the underwater
funds, the transport of small objects... The SPC-03
measures 1,23 meter length and resembles as much a fish by its form
that by its movements. It is stable, very handy, and is controlled
remotely by technicians. It can work 2 to 3 hours in immersion, at the
maximum speed of 4 km/h. This robotic fish is intended for underwater
archaeological exploration but the two persons in charge for the
project, Wang Tianmiao (BUAA) and Tan Min (CASE), consider many other
uses such as underwater photography, the cartography of the underwater
funds, the transport of small objects...
Result of several years of research, the robot was tested in August
2004 on the site of a marooned warship. The Chinese archaeologists are
interested in this warship because it sank near the island of Dongshan
(province of Fujian, China) approximately 340 years ago. This ship
belonged to the general Zheng Chenggong who took again the island of
Taiwan to the Dutchmen in 1662 (Dongshan and Taiwan are to only 277 km
one of the other, on each side of the strait of Taiwan). Arms and
valuable articles (porcelain) having already been found on this site,
the Chinese authorities decided to continue research in order to locate
other vestiges. Thus, the robotic fish explored a surface of more than
4000 m2 over 6 hours of immersion. It took many photographs and
transmitted to the surface.
|
|
| |
|
|
|
|
| |
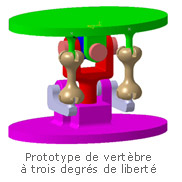
Robotic Eel, Robea Project,
multi-field team, CNRS, France
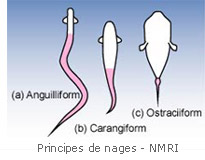
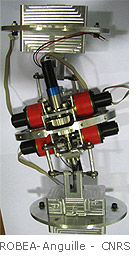  The objective of the ROBEA-Eel project is to
"design, study and produce a robotic eel able to swim in three
dimensions". Whereas certain fish as tuna have a mode of locomotion
based on oscillations of the body, the locomotion anguilliforme (eel,
lamprey...) is based on undulations of the body. Thus, the swimming of
eel presents remarkable performances in term of maneuverability. It is
the high number of internal degrees of freedom of this fish which
enables him to thread in the most difficult places of access. The
prototype of project ROBEA consists of a stacking of platforms of the
kneecap type, imitating the vertebrae of eel. This national project
gathers several laboratories of which the LAG, Laboratoire of automatic
of Grenoble, which is for example charged to set up the systems of
control of the movements of the eel (orientation, speed) as well as
stabilization in rolling of the robot. The objective of the ROBEA-Eel project is to
"design, study and produce a robotic eel able to swim in three
dimensions". Whereas certain fish as tuna have a mode of locomotion
based on oscillations of the body, the locomotion anguilliforme (eel,
lamprey...) is based on undulations of the body. Thus, the swimming of
eel presents remarkable performances in term of maneuverability. It is
the high number of internal degrees of freedom of this fish which
enables him to thread in the most difficult places of access. The
prototype of project ROBEA consists of a stacking of platforms of the
kneecap type, imitating the vertebrae of eel. This national project
gathers several laboratories of which the LAG, Laboratoire of automatic
of Grenoble, which is for example charged to set up the systems of
control of the movements of the eel (orientation, speed) as well as
stabilization in rolling of the robot.
IRCCYN laboratory: http://www.irccyn.ec-nantes.fr/spip.php?rubrique200&sstheme=203
|
|
| |
|
|
|
|
| |
Boxybot (from boxfish), Daisy
Lachat, BIRG – EPFL, Suiss
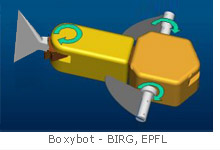 Developed
with the BIRG (Biologically Inspired Robotics Group), the Boxybot
project aims at the realization of an autonomous robot able to
evolve/move in water. Research related in particular to the study and
the realization of the various forms and uses of the fins in fish of
the labriform type and ostraciiform: these fish have a rigid body and a
low speed but a great maneuverability thanks to their fins. In fish of
the labriform type, the pectoral fins are used for the propulsion and
the caudal fin is used as rudder. Boxybot is 25 cm long and can swim up
to 0,37 m/s. It can plunge, swim ahead, behind, on the side and carry
out gimlets. The speed depends on the amplitude and the frequency of
the oscillations on the fins (with thresholds not to be exceeded), and
also size and rigidity of those. Developed
with the BIRG (Biologically Inspired Robotics Group), the Boxybot
project aims at the realization of an autonomous robot able to
evolve/move in water. Research related in particular to the study and
the realization of the various forms and uses of the fins in fish of
the labriform type and ostraciiform: these fish have a rigid body and a
low speed but a great maneuverability thanks to their fins. In fish of
the labriform type, the pectoral fins are used for the propulsion and
the caudal fin is used as rudder. Boxybot is 25 cm long and can swim up
to 0,37 m/s. It can plunge, swim ahead, behind, on the side and carry
out gimlets. The speed depends on the amplitude and the frequency of
the oscillations on the fins (with thresholds not to be exceeded), and
also size and rigidity of those.
See project and videos.
|
|
| |
|
|
|
|
| |
Essex Robotic Fish, Jindong Liu,
Huosheng Hu,
Dept of Computer Science University of Essex, G.B.
 The goal of the researchers of the university of
Essex was to carry out a robot-fish which can swim like a real fish and
which is autonomous. A fish has various modes of displacement (speed,
turns, accelerations, braking) and the challenge of the researchers of
Essex was to obtain an autonomous robot-fish who can reproduce all
these behaviors and not one or two in a more or less uniform way. They
thus indexed the various behaviors in a library used by the computer to
generate varied and unexpected trajectories of stroke. Robotic Fish (50
cm length) is for example able to curve its body according to a great
angle in a very reduced time (approximately 90°/0.20sec). Several
models were designed, since G1 in 2003 until G8 and G9 in 2005. The
researchers continue to work on the improvement of the algorithms of
training which make it possible the robot to generate adaptive
behaviors in a changing environment and thus unpredictable. The goal of the researchers of the university of
Essex was to carry out a robot-fish which can swim like a real fish and
which is autonomous. A fish has various modes of displacement (speed,
turns, accelerations, braking) and the challenge of the researchers of
Essex was to obtain an autonomous robot-fish who can reproduce all
these behaviors and not one or two in a more or less uniform way. They
thus indexed the various behaviors in a library used by the computer to
generate varied and unexpected trajectories of stroke. Robotic Fish (50
cm length) is for example able to curve its body according to a great
angle in a very reduced time (approximately 90°/0.20sec). Several
models were designed, since G1 in 2003 until G8 and G9 in 2005. The
researchers continue to work on the improvement of the algorithms of
training which make it possible the robot to generate adaptive
behaviors in a changing environment and thus unpredictable.
To learn more: http://dces.essex.ac.uk/staff/hhu/
Videos
: http://dces.essex.ac.uk/staff/hhu/jliua/videogal.htm
Video shot at the Aquarium.
|
|
| |
|
|
|
|
| |
Robotic koi (carp koï), Ryomei
Engineering, Japan
 A robot-fish inspired of the carp koï was
presented in March 2006 in Japan. It was developed by three companies
of which Ryomei Engineering, a subsidiary company of Mitsubishi Heavy
Industries, which is already at the origin of the series "Mitsubishi
Animatronics" (see Coelacanth). The carp koï was selected because it is
symbol of force and chance in Japan. The robot, which measures 80 cm
and weighs 12 kg, is remote controlled. Its mouth is equipped with
sensors being used to control the oxygen concentration in water,
information essential if one wants to supervise the health of fish. A robot-fish inspired of the carp koï was
presented in March 2006 in Japan. It was developed by three companies
of which Ryomei Engineering, a subsidiary company of Mitsubishi Heavy
Industries, which is already at the origin of the series "Mitsubishi
Animatronics" (see Coelacanth). The carp koï was selected because it is
symbol of force and chance in Japan. The robot, which measures 80 cm
and weighs 12 kg, is remote controlled. Its mouth is equipped with
sensors being used to control the oxygen concentration in water,
information essential if one wants to supervise the health of fish.
In a second step, the researchers want to make their robot autonomous.
Thanks to its camera, the robot could be sent in recognition to examine
the resources present in the depths. It could be also used to inspect
the oil platforms to locate and supervise possible damage.
Video of
the robot: http://youtube.com/watch?v=M7YGEVuJ4mM
another video : http://youtube.com/watch?v=3P0aafialbg.
|
|
| |
|
|
|
|
| |
Remote Controlled Robotic Shark
 In the category "Toys and Games", a store of New
York sells (on line also) a remote-controlled shark for a hundred
dollars. It is said that this robot swims in an elegant and gracious
way like its model. It can plunge to 2,7 m of depth, and operates by a
remote control which functions up to 12 m of distance, is also
waterproof, which makes it possible to swim with him. This robot-toy
measures approximately 61 cm and two models are available (blue or red)
and function over different frequencies to be able to use them at the
same time. In the category "Toys and Games", a store of New
York sells (on line also) a remote-controlled shark for a hundred
dollars. It is said that this robot swims in an elegant and gracious
way like its model. It can plunge to 2,7 m of depth, and operates by a
remote control which functions up to 12 m of distance, is also
waterproof, which makes it possible to swim with him. This robot-toy
measures approximately 61 cm and two models are available (blue or red)
and function over different frequencies to be able to use them at the
same time.
The website HAMMACHER SCHLEMMER : http://www.hammacher.com/publish/72824.asp#
|
|
| |
|
|
|
|
| |
Manta Ray, EvoLogics, Germany
 Evologics
is a spin-off of the Technical
University Berlin with Festo partnership. Due to the use of "Festo
Fluidic Muscles" actuators, wings shape can adapt gradually to water
movements around the body. 3 propulsion modes are used. First use wings
movement for quiet, fast and efficient moving with high
manoeuvrability. Second use buoyancy variation with volume adjustment
to sailplane up and down. Third use hydrojet propulsion for add-on
speed requirements or stable trajectory needed by sensors. Evologics
is a spin-off of the Technical
University Berlin with Festo partnership. Due to the use of "Festo
Fluidic Muscles" actuators, wings shape can adapt gradually to water
movements around the body. 3 propulsion modes are used. First use wings
movement for quiet, fast and efficient moving with high
manoeuvrability. Second use buoyancy variation with volume adjustment
to sailplane up and down. Third use hydrojet propulsion for add-on
speed requirements or stable trajectory needed by sensors.
This technology will be useful for deep sea exploration, offshore
industry, sensible ecological research, environmental monitoring and
marine security.
Video
of the Robotic Ray : http://www.youtube.com/watch?v=4kDZViMmHL0
|
|
| |
|
|
|
|
| |
Robofish, University of Washington,
U.S.A.
 The "Robofish" of the University of Washington
measures a half meter long and weighs 3kg. It is highly manoeuvrable
and can swim backwards by inverting pectoral fins. The "Robofish" of the University of Washington
measures a half meter long and weighs 3kg. It is highly manoeuvrable
and can swim backwards by inverting pectoral fins.
Since radio signals travel badly in salt water, Kristi Morgansen and
colleagues studied a system that allow robots to communicate each
others. Thus, robots can swim in the same direction or spread out to
cover larger surface.
During the experiment, 3 Robofish broadcasted their headings to each
other, and used any information received to adjust their own courses.
According to Kristi Morgansen, the group remained coordinated despite
about half of all information packets being lost - showing that the
system is relatively robust.
With the same technique, it will be possible to explore large areas,
track a pollution spill, or to report the location of marine animals.
The official page with videos
: http://www.engr.washington.edu/facresearch/highlights/aa_robofish.html
Video of
the "school of" 3 Robofish : http://www.youtube.com/watch?v=Kk40ZnuzNNw
|
|
| |
|
|
|
|
| |
Stingray, Knifefish and overs,
Nanyang Technological University, Singapore
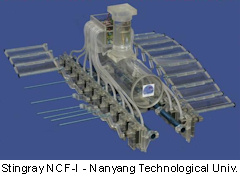
Researchers
of the School of Mechanical and Aerospace Engineering from Nanyang
Technological University study fish propulsion. Their objective is to
design and optimize robotic fish using undulating fin mechanisms. Thus,
for experiments they designed different types of robotic fish like a
Stingray Robot, a Knifefish Robot, an Arowana Robot and more...
In this document
gently sent to us by Yu Zhong, you can find more information about the
design of undulating fins and their efficiency.
Video
of the NAF-I Robotic Fish : http://www.youtube.com/watch?v=FKVNprWTceo
Video
of the Stingray Robot NCF-I: http://www.youtube.com/watch?v=8sIFHOw4WC0
Video of
the Knifefish Robot NKF-II: http://www.youtube.com/watch?v=qU_bnb5q0RA
|
|
| |
|
|
|
|
| |
Tai-robot-kun, University of
Kitakyushu, Japan
 Engineers
at
the University of Kitakyushu have developed one of the most realistic
biomimetic robot in the world. Engineers
at
the University of Kitakyushu have developed one of the most realistic
biomimetic robot in the world.
This red snapper is actually a robotic fish known as “Tai-robot-kun”.
Tai-robot-kun weighs 7kg and mimics a real fish swimming silently in
the water, and can go for as long as an hour with a full battery.
It has a silicone body covered in realistically hand-painted scales,
features a unique propulsion system that allows it to move its tail and
drift silently through the water like a real fish (source: OTAKU).
Video
of Tai-robot-kun : http://www.youtube.com/watch?v=WINc1mV-L8Y
|
|
| |
|
|
|
|
| |
MIRO, AIRO inc, Korea
 MIRO(Marine Intelligence Robot) is a bio-mimetic robot fish designed for museums, ornamental applications and gaming. It uses special waterproof articulations so that it can dive up to 10 meters in water. It embeds a red LED in the nose and two white LEDs as eyes for fun effects. MIRO usually swims in autonomous mode but can be used in remote mode with either a special tactile control panel or a mobile application(Android OS only). This functionality is useful for public interaction, in for example, gaming controlling MIROs.
MIROs ancestor version was called FIRO, first exhibited on Marine Robot Pavilion at Yeosu 2012 World Expo. MIRO now has two different sizes, 53cm(MIRO-9) and 35cm(MIRO-7). MIRO(Marine Intelligence Robot) is a bio-mimetic robot fish designed for museums, ornamental applications and gaming. It uses special waterproof articulations so that it can dive up to 10 meters in water. It embeds a red LED in the nose and two white LEDs as eyes for fun effects. MIRO usually swims in autonomous mode but can be used in remote mode with either a special tactile control panel or a mobile application(Android OS only). This functionality is useful for public interaction, in for example, gaming controlling MIROs.
MIROs ancestor version was called FIRO, first exhibited on Marine Robot Pavilion at Yeosu 2012 World Expo. MIRO now has two different sizes, 53cm(MIRO-9) and 35cm(MIRO-7).
For more information, visit AIRO(MIRO manufacturer, Artificial Intelligence Robot) : http://www.airo.kr/
AIRO Youtube Channel : https://www.youtube.com/channel/UCZC8HbPvtUdXcicyVDgaOUw/
AIRO Facebook : https://www.facebook.com/robotfish.miro
|
|
| |
|
|
|
|
| |
Jessiko, ROBOTSWIM, France
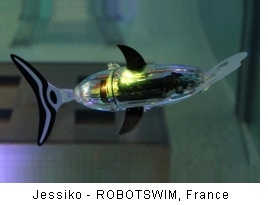 Jessiko is one of the smallest robot fish in the world (22cm/150g). Thanks to its communication potential uses and its artificial intelligence, Jessiko can swim in a school of 10 fish or more to create entertaining aquatic choreography and light effects.
Christophe Tiraby, the inventor of the robotic fish and founder of Robotswim, won the "Grand Prix de l'Innovation de la Ville de Paris" (Great Prize for Innovation of Paris City) in the Industrial Decorative Design category for the Jessiko robot fish project. Jessiko is one of the smallest robot fish in the world (22cm/150g). Thanks to its communication potential uses and its artificial intelligence, Jessiko can swim in a school of 10 fish or more to create entertaining aquatic choreography and light effects.
Christophe Tiraby, the inventor of the robotic fish and founder of Robotswim, won the "Grand Prix de l'Innovation de la Ville de Paris" (Great Prize for Innovation of Paris City) in the Industrial Decorative Design category for the Jessiko robot fish project.
The series model was first exhibited on France Pavilion at Yeosu 2012 World Expo.
It is currently marketed at events and for prestige decoration (luxury hotels, commercial centers, museums, waiting rooms, clubs...).
For more information, visit Robotswim website : http://www.robotswim.com/
Most amazing videos of
Jessiko : https://www.youtube.com/watch?v=J_qFOQkrxHA
Jessiko Facebook page: https://www.facebook.com/jessiko.robot.fish
|
|
|

